
Arduino Uno
Placa de control que hace de “cerebro” del robot. Aquí se programa la lógica para leer sensores y controlar motores.
Guía práctica para construir un robot seguidor de líneas usando Tinkercad — pensado para estudiantes.
SeguidorTech es un sitio educativo que explica, paso a paso y con recursos visuales, cómo construir un robot seguidor de líneas. Encontrarás fichas de componentes, guías de conexión, enlaces a simulaciones en Tinkercad y ejercicios de repaso.
Placa de control que hace de “cerebro” del robot. Aquí se programa la lógica para leer sensores y controlar motores.

Mueven el robot. Se conectan mediante un driver que controla dirección y velocidad.
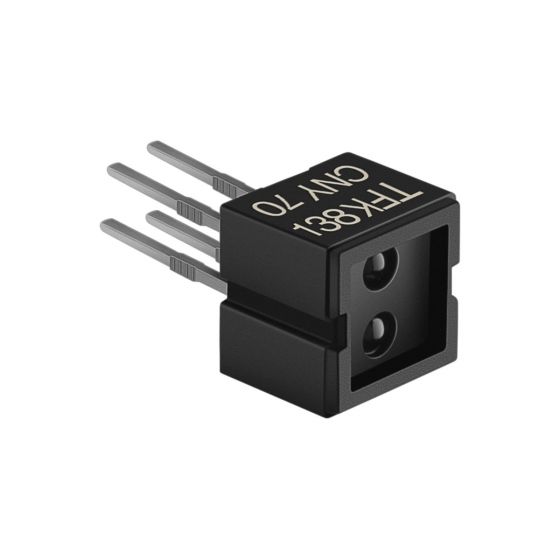
Detectan el contraste de la línea (negro sobre blanco) para que el robot siga el trazado.
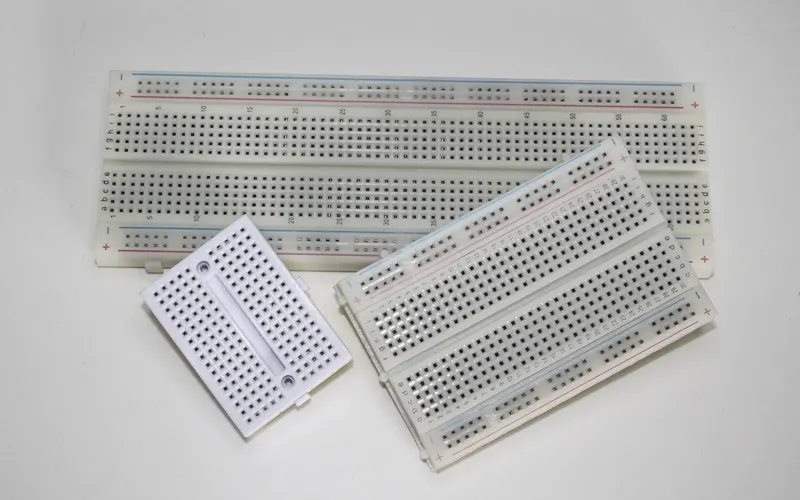
Se usan para montar el circuito sin soldar y conectar sensores, driver y la placa Arduino.
Conecta la batería (por ejemplo 9V o pack Li-ion) al regulador o directamente al jack de la placa según especificación.
Los motores no conectan directo al Arduino: usa un driver (L298N / TB6612) entre Arduino y cada motor.
Los sensores IR se leen en entradas digitales o analógicas del Arduino (A0, D2, etc.).
Nota: en la sección de simulación (abajo) encontrarás un proyecto Tinkercad ya cableado para probar sin componentes físicos.
Puedes abrir la simulación recomendada en Tinkercad y probar el robot virtualmente — cambia el código y observa cómo responde.
Enlace de ejemplo (Tinkercad):
El cuadrado rojo representa el robot; usa los controles para alterar velocidad/ruido (simula sensores poco calibrados).
1. ¿Qué componente se encarga de leer la línea en el suelo?
2. ¿Qué módulo se usa para manejar motores con Arduino?
3. ¿Qué pin suele usarse para leer sensores analógicos?
4. ¿Qué debes evitar al conectar motores al Arduino?